Ik heb een vraag gekregen van een cursist en ik kom er niet uit. Hoplelijk kunnen jullie mij helpen.
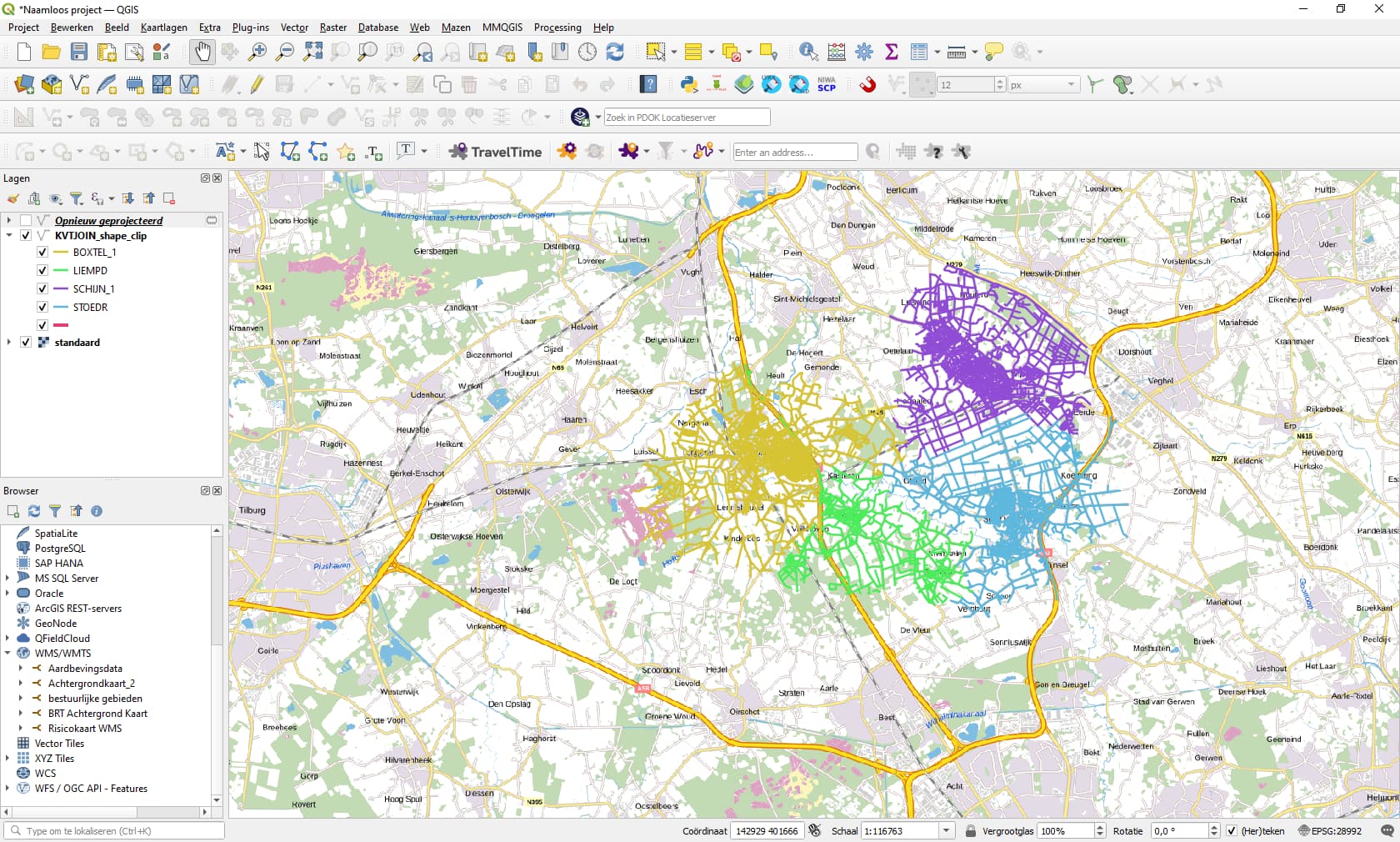
Ik heb een bestand gekregen (shape) en deze bestaat uit lijnen die een uitruk gebied vormen van bepaalde kazernes (zie afbeelding). Nu wil ik van deze groepen lijnen een vlak maken die het uitruk gebied vormen. Kan iemand mij helpen welke tool je hiervoor zou kunnen gebruiken.
Hoi Lars, heb je deze tool al bekeken? Wat zijn je bevindingen? Kun je ipv een netwerkanalyse op deze manier geen gebruik maken van ORS tools? Dan kun je een isochrone maken vanaf een kazernepoint
Je zou ook gebruik maken van een convex hull. Je krijgt dan een omsluitende polygoon om je brongeometrie heen (in dit geval dus een set lijnen)
In de processing toolbox heb je twee tools die dit op een net iets andere manier doen:
Convex hull: berekent de omsluiting van elk los object in de kaartlaag. Ik denk voor een uitrukgebied minder geschikt
“minimum begrenzing geometrie”: deze kan verschillende omgrenzingen/bounding boxes genereren, maar kan ook een convex hull om de hele kaartlaag maken. Lijkt mij het meest geschikt voor een uitrukgebied van brandweerwagens.
ORS Tools heb ik geen ervaring mee, maar ik zou zeggen: kwestie van uitproberen en mee stoeien! je hebt wel een gratis API key nodig
Het is denk ik wel goed om je even te realiseren dat de verschillende tools die hier genoemd worden, wel echt verschillende zaken opleveren.
Een convex of concave hull levert alleen een polygoon om andere objecten (de lijnen in jouw geval), dus dan is het afhankelijk van wat die oorspronkelijke lijnen voorstellen.
De isochronen-tool van Openroute Service (ORS) levert een vereenvoudigde polygoon op, die aangeeft hoe ver je vanaf een bepaald punt kunt komen als je een x aantal kilometers of een x aantal minuten rijd, loopt of fietst. Maar daarbij is het wel belangrijk je te realiseren dat dat bepaald word op basis van een gewone verkeersdeelnemer, en de gegevens die in Openstreetmap (OSM) zitten. Maar een TAS met Prio 1 (en zelfs met Prio 2) mag meer dan de gewone verkeersdeelnemer, wat dus meteen beinvloed hoever die TAS kan komen binnen een bepaalde tijd, maar ook op welke plekken. Bij de standaard berekening van een isochroon voor een auto zullen bijvoorbeeld fietspaden niet meegenomen worden, terwijl een Prio 1 hulpverleningsvoertuig daar wel over mag rijden. En dat beinvloed dus de uiteindelijke polygoon die berekend zou moeten worden.
Het is dus goed om nog eens te kijken naar de achterliggende informatievraag van deze cursist (waarom wil je die polygonen hebben). Als dat bijvoorbeeld is omdat ze alle Verblijfsobjecten binnen die uitrukgebieden willen opvragen uit de BAG, dan voldoet een concave hull prima.
Als ze aanrij-tijden willen berekenen, dan word het dus een heel ander verhaal…
Op dat brandweerkaartje staan wegen die niet op Openstreetmap staan. Blijkbaar heeft de brandweer haar eigen kaart.
Een vergelijking met OSM is dus niet nodig.
 je hebt wel een gratis API key nodig
je hebt wel een gratis API key nodig